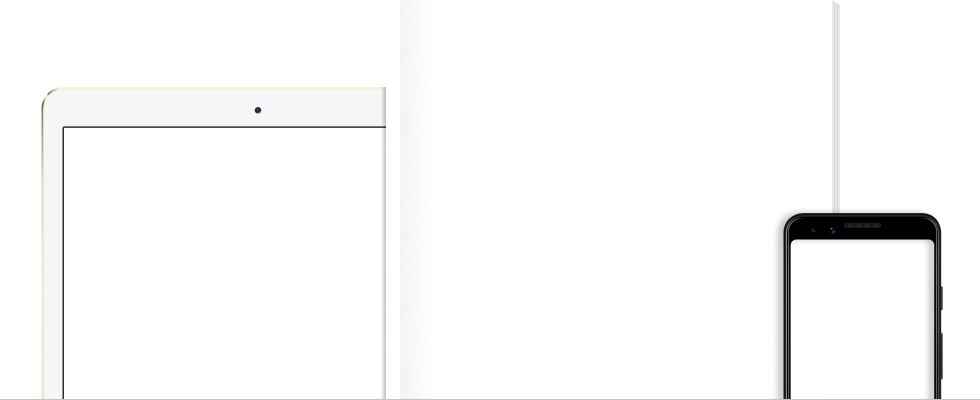

На рисунке изображен прототип автономной установки перемещения астронавта, испытывавшейся на американской орбитальной станции «Скайлэб» (1973–1974). Несмотря на то что «ранец» мог надеваться поверх скафандра, астронавты испытали установку только внутри герметичных объемов огромной станции.
1. «Ранец» с системой управления
2. Рукоятки ручного управления движением и ориентацией
3. Сферический баллон со сжатым азотом
Человек всегда хотел летать как птица. Но, поднявшись на орбиту, он вынужден ползать, цепляясь за поверхность космических аппаратов… если только у него нет специального устройства для автономного передвижения в космосе
Первое устройство для перемещения в космосе, созданное американцами. HHMU напоминало ручное оружие, было простым, но неудобным и не получило дальнейшего развития.
1. Два сопла движения вперед
2. Одно сопло движения назад
3. Пистолетная рукоятка
4. Баллоны со сжатым газом
5. Система жизнеобеспечения
6. Фотоаппарат
Космонавт медленно перемещается по поверхности космической станции, уже подбирается к месту неисправности, но за пару метров до цели обнаруживает, что цепочка, соединяющая его со шлюзом, слишком коротка. На минуту замешкавшись, он отстегивает от пояса карабин с цепочкой, чтобы закрепить его на ближайшей скобе. В этот момент, непроизвольно рванувшись за выскользнувшим из рук инструментом, космонавт отделяется от станции и, беспорядочно вращаясь, летит в космическую бездну. Неужели гибель? Но в движениях космолетчика нет и тени паники. Взяв в руки пару устройств, похожих на пистолеты, он целится куда-то в пустоту и нажимает «спусковые крючки». Из сопел беззвучно вырывается сжатый воздух, и реактивная сила в полном соответствии с законами механики возвращает человека к станции. Менее чем за минуту, умело манипулируя «пистолетами», космонавт причаливает и приступает к ремонту, ради которого и выбрался в пустоту...
Примерно так рисовалась пионерам космонавтики картина работы человека в открытом космосе.
Первое в мире реальное устройство для свободного перемещения в космосе, созданное по американской программе «Джемини», было выполнено как раз по схеме «реактивного пистолета». Оно носило название HHMU (HandHelded Maneuvering Unit, «ручное устройство маневрирования»), работало на сжатом кислороде и применялось во время выхода в открытый космос астронавта корабля «Джемини-4» Эдварда Уайта. Такой пистолет, конечно, давал большую свободу передвижения, чем страховочный фал, связывающий с кораблем, но при этом как минимум одна рука астронавта была занята.
Лет 30–40 назад казалось, что до эпохи индустриального освоения космоса рукой подать. А для сборочно-монтажных и ремонтных работ на околоземных орбитах, конечно, потребовались бы устройства индивидуального передвижения в открытом пространстве. К сожалению, для таких задач реактивные пистолеты оказались непригодны, причем главным образом из-за низкой точности, поскольку управлялись вручную и на глазок. Устройство для перемещения космонавта-монтажника должно обеспечивать надежную ориентацию в пространстве, точное передвижение из точки в точку, комфортные условия работы и большую автономность действия.
«Реактивная подкова»
Уже в начале 1960-х было известно, что человеку гораздо проще управлять линейными скоростями и перемещениями, чем вращательными движениями. Поэтому система ориентации устройства должна быть хотя бы частично автоматизированной и ограничивать угловые скорости и ускорения. Например, было определено, что двигатель ориентации ни в коем случае не должен позволять космонавту вращаться быстрее, чем со скоростью 40–50 градусов в секунду. Желательно также, чтобы система точно определяла свои координаты или хотя бы расстояние и ориентацию относительно цели движения и места, куда надо вернуться. Всегда должна сохраняться связь с космическим кораблем или с Землей, и все это должно обеспечиваться в течение нескольких часов автономной работы. Если опираться на элементную базу 1960-х годов, то вырисовывался агрегат массой в сотни, если не тысячи килограммов. Чтобы уложиться в разумные ограничения по массе, конструкторам приходилось искать компромисс между ручным и автоматическим управлением.
Таким компромиссом было советское устройство перемещения и маневрирования космонавта (УПМК), которое разрабатывалось сначала для кораблей «Восход», а затем, в 1965–1966 годах, по программе военных станций «Алмаз». Установка в форме подковы как бы обнимала космонавта в скафандре. Перемещение обеспечивалось двумя блоками — разгонным и тормозным, каждый из 42 пороховых двигателей. Срабатывание одного двигателя разгоняло космонавта на 20 сантиметров в секунду. Вдоль современной стометровой Международной космической станции (МКС) с такой скоростью можно было бы пролететь примерно за 10 минут. Двигаться медленнее было невыгодно, быстрее — опасно и расточительно. И разгонные, и тормозные двигатели размещались так, чтобы вектор тяги проходил через центр масс, не вызывая разворотов космонавта. Система ориентации состояла из 14 миниатюрных сопел, работавших на сжатом воздухе, и управлялась «джойстиком» на подлокотнике подковы, причем автоматика ограничивала скорость разворота.
Масса УПМК составляла 90 килограммов, а вместе с пилотом в скафандре — 250 килограммов. Аккумуляторы обеспечивали до четырех часов автономной работы в открытом космосе. А запаса топлива, если бы целиком потратить его на ускорение в одном направлении, хватило бы для разгона до скорости 32 м/с. Этот параметр в космонавтике называют характеристической скоростью устройства. Применение твердого ракетного топлива и сжатого воздуха упрощало эксплуатацию и повышало безопасность УПМК. К сожалению, испытать устройство на орбите советским космонавтам так и не удалось.
Небесный тихоход
Маневренность аппарата определяется запасом топлива и скоростью его истечения из сопла. Скорость зависит от температуры газа и степени расширения сопла. Высокая температура сгорания жидкого или твердого топлива обеспечивает скорость истечения 2–3 км/с. Из баллона сжатый воздух через сопло течет в три – пять раз медленнее, и для разгона газа требуется во столько же раз больше. И все же для маневров вблизи станции в основном пользуются сжатым воздухом. Главное здесь — надежность и безопасность использования, скорости нужны небольшие, и при переходе на ракетное топливо выигрыш в массе рабочего тела теряется из-за увеличения массы и сложности двигательной установки и оборудования для ее обслуживания. Для автомобиля запас топлива определяет путь, который он сможет проехать. В космосе же от топлива зависит не путь, а суммарное изменение скорости, которого можно достичь, израсходовав весь запас. Даже большое расстояние можно преодолеть с минимальными запасами топлива, если снизить скорость. Но чрезмерно медлить за бортом станции не дают другие ограничения: ресурс жизнеобеспечения скафандра и высокая стоимость работ в открытом космосе.
Советское устройство перемещения и маневрирования космонавта 21КС было настоящим космическим кораблем в миниатюре и предназначалось для «строительных работ» в космосе.
1. Ранец с запасом сжатого газа и системой управления
2. Сопла бокового смещения
3. Отгибаемые подлокотники с рукоятками управления
Оседлать космический ранец
Ради повышения характеристической скорости и улучшения маневренности предпринимались и попытки использовать в устройствах передвижения жидкое топливо. Так, в AMU (Astronaut Maneuvering Unit) — первом американском устройстве «ранцевого» типа — топливом служила жидкая 90-процентная перекись водорода. Масса устройства составляла 75 килограммов, из них 20 приходилось на системы жизнеобеспечения, а 11 — на топливо. При этом характеристическая скорость AMU была вдвое выше, чем советской модели — 76 м/с. При выведении на орбиту AMU крепилось снаружи на приборно-агрегатном отсеке корабля. Работа астронавта в открытом космосе выглядела так. Одетый в скафандр, он выходил из гермокабины, с помощью поручней переходил к устройству и надевал его как ранец. После этого можно было отделяться от корабля и маневрировать. Общая масса этого своеобразного космического аппарата, состоявшего из астронавта в полном снаряжении и AMU, достигала 185 килограммов. Движение в космосе обеспечивали 16 небольших ракетных двигателей. Испытания системы состоялись в июне 1966 года во время полета корабля «Джемини-9А». Но первый блин оказался комом. Астронавт Юджин Сернан с большим трудом добрался до установки, оседлал «космический мотоцикл» и вдруг обнаружил, что… ничего не видит! Переход через открытый космос не прошел даром — астронавт очень устал, пот застилал ему глаза и конденсировался на стекле гермошлема. И ведь рукой его, как на Земле, не сотрешь! Вдобавок оказалось, что Сернан не может манипулировать «джойстиком» управления AMU — рука не дотягивалась, а когда дотянулась, он сломал рукоятку — ее заклинило. Одновременно ухудшилась связь с напарником Томасом Стаффордом, оставшимся в кабине «Джемини». Астронавту ничего не оставалось делать, как отсоединиться от AMU и возвратиться в корабль.
Техника сорокалетней давности не позволяла воплотить в компактном устройстве весь набор необходимых функций. Многое космонавту приходилось делать вручную, полагаясь на свой вестибулярный аппарат и глазомер. В 1980-х годах аппаратура стала миниатюрнее и легче. Кроме того, резерв массы для размещения дополнительных приборов увеличился за счет снижения требований к характеристической скорости, ведь ожидавшееся масштабное космическое строительство так и не началось. Назначением УПК (устройства передвижения космонавта) теперь виделось обследование спутников, требующих ремонта, а также инспекция состояния наружных систем орбитальных станций. Для этих ограниченных задач полной автоматизации процесса управления не требовалось. Тем не менее были созданы достаточно сложные УПК, позволившие разгрузить космонавта от многих рутинных операций. Пилот теперь только подавал команды «джойстиками», а с какой скоростью двигаться, сколько и каких двигателей задействовать, решали уже автоматические системы.
Звездный дайвинг
Советское средство передвижения космонавта 21КС (СПК), созданное для работы совместно со скафандром «Орлан ДМА» на станциях типа «Мир» и кораблях «Буран», могло работать в двух режимах: экономичном и форсированном. Первый ограничивал линейные и угловые скорости вблизи станции или спутника-мишени. Газовые сопла выбрасывали сжатый воздух импульсами длительностью около одной секунды, а скорость вращения не превышала 10 °/с. Так что для разворота кругом требовалось не менее 20 секунд. Форсированный режим служил для быстрых перемещений на безопасном расстоянии от станции и для экстренного реагирования в случае риска столкновения. При этом линейные сопла работали импульсами по четыре секунды, а угловые ускорения достигали 8 °/с2 — почти втрое больше, чем в экономичном режиме. Основу конструкции составлял массивный ранец, на котором размещались все системы. Сжатый воздух, как у дайверов, хранился в двух 20-литровых баллонах под давлением 350 атмосфер и выпускался через 32 сопла. Пульты управления с тумблерами и рукоятками располагались на двух консолях — под обеими руками космонавта. Подавая команду с помощью тумблера на пульте, космонавт открывал электропневмоклапан, который, в свою очередь, управлял подачей воздуха через сопла тягой 5 ньютонов (0,5 килограмма-силы) каждое. Сопла располагались по углам «ранца» и позволяли как двигаться по прямой, так и совершать повороты вокруг трех осей. Первые летные испытания 21КС провели в феврале 1990 года космонавты Александр Серебров и Александр Викторенко на станции «Мир». Они выходили в открытый космос из модуля «Квант-2» и удалялись от станции на 35–45 метров. Для безопасности на данном этапе использовалась страховочная лебедка, однако при штатной эксплуатации СПК должно было работать без «привязи», удаляясь на расстояние до 60 метров от станции «Мир» и до 100 метров от корабля «Буран». Разница объяснялась тем, что «Буран» мог в случае неполадок в СПК легко догнать космонавта.
Ловцы спутников
Отечественное устройство было аналогом не менее совершенного американского «космического мотоцикла» MMU (Manned Maneuvering Unit, «пилотируемый маневрирующий блок»). При схожей с 21КС конструкции он имел несколько меньшую характеристическую скорость и был на 30 килограммов легче. В двух алюминиевых баллонах, усиленных кевларом, содержалось шесть килограммов азота (он и выбрасывался из сопел, приводя систему в движение). В отличие от советской системы 21КС, MMU применялся для решения практических задач. В 1984–1985 годах с его помощью астронавты сняли с орбиты несколько телекоммуникационных спутников, которые из-за неполадок не вышли на расчетные орбиты. В частности, Джозеф Аллен и Дейл Гарднер «поймали» соответственно спутники Westar VI и Palapa B2. В грузовом отсеке шаттла «Челленджер» их отправили на Землю. Но, несмотря на успех программы MMU, катастрофа «Челленджера» поставила на ней крест. Применение шаттлов для возвращения даже очень дорогих спутников было признано слишком рискованным. Да и стоимость пилотируемых полетов настолько велика, что чаще всего дешевле запустить новый аппарат, чем посылать к сломавшемуся живого ремонтника.
Так что на устройства передвижения пока возлагаются ограниченные задачи. Например, спасение космонавта при случайном удалении от станции во время выхода в открытый космос. Российское устройство спасения космонавта (УСК) крепится сзади к скафандру «Орлан-М» и питается от его батарей. Оно обеспечивает проход через люк диаметром 0,8 метра и приводится в действие переключателем, размещенным на пульте управления скафандра. В полуавтоматическом режиме система обеспечивает стабилизацию космонавта по трем осям с точностью 5 градусов, а также позволяет вручную управлять поворотами вокруг одной выбранной оси. Есть и режим прямого управления, когда космонавт сам парирует все угловые возмущения. И, конечно, в обоих режимах можно произвольно менять линейную скорость. У американцев похожее УСК, называемое SAFER (Simplifi ed Aid for EVA Rescue, или упрощенное устройство для спасения космонавта при внекорабельной деятельности), применялось уже более чем в 100 выходах в открытый космос.