- Источник:
- MIT
Специалисты из Массачусетского технологического института нового робота-манипулятора, способного находить любые предметы. Ранее команда уже представляла систему, которая использует визуальную информацию с камеры, радиочастотные сигналы и роботизированную руку, но она могла искать только маркированные предметы. Теперь робота усовершенствовали.
Найти в комнате булавку или ключ — не самая сложная задача для человека, хотя и не все согласятся с этим утверждением. Мы сразу догадаемся, что нужно потрясти постельное белье, отодвинуть шкаф или просто методично разбирать завалы игрушек. А робота пришлось учить.
- Источник:
- Vladimir Arndt / Alamy
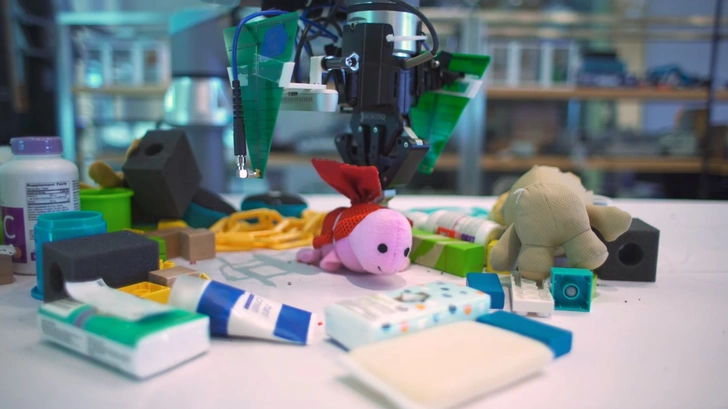
В итоге FuseBot оказался способен на сложный анализ. Ученые предложили роботу задачу, основанную на том, что не все предметы в куче будут иметь RFID-метки. Извлечь нужно было как раз немаркированный объект. При этом робот знал форму и размер вещи, которую ищет.
Манипулятор сканировал камерой груду предметов и создавал ее 3D-модель, а радиочастотной антенной посылал сигналы, которые способны проникать через большинство твердых поверхностей. Сигналы выявляли метки. Система рассуждала: цель без маркировки не может находиться там, где есть метка.
Анализируя, машина обновляла 3D-модель вероятного местонахождения цели, а также самый эффективный способ добраться до нее — с наименьшим количеством перемещений.
Всего было проведено 180 экспериментов, в которых электронная рука разбирала скопления предметов: канцелярские принадлежности, одежду, игрушки и другие. В 95% случаев бот находил цель. Это успех MIT — другая аналогичная система ранее показала 84% эффективности. При этом новому роботу для выполнения задачи потребовалось на 40% меньше движений и в два раза меньше времени.
- Источник:
- MIT
Разработчики отмечают, что FuseBot можно применять в самых разных условиях, так как «ПО сложного рассуждения» может быть установлено на любом компьютере. Главное, чтобы он был соединен с рукой-манипулятором, камерой и антенной.
Систему предлагают внедрить, например, на коммерческих складах, чтобы обрабатывать возвраты и сортировать вещи быстрее, чем это делает человек. Также создатели планируют интегрировать систему в мобильного робота, который будет сам передвигаться и искать предметы на большой территории.
Видео: .