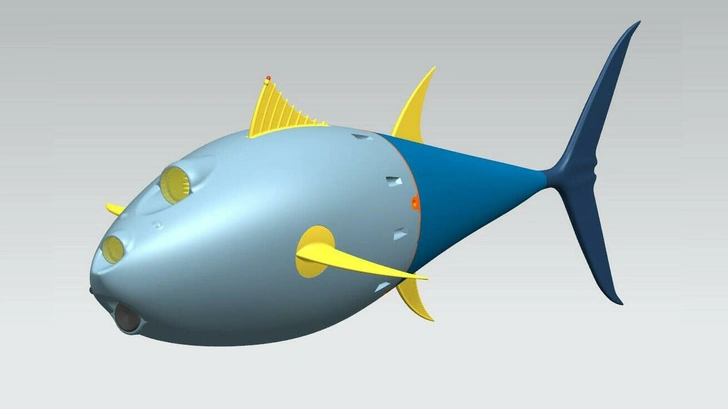
Сотрудники Центра нейротехнологий и машинного обучения Балтийского федерального университета им. Иммануила Канта под руководством профессора Виктора Казанцева продемонстрировали ходовой макет подводного биоморфного робота-тунца, который сможет управлять движением косяков рыб в случае экологической катастрофы.

- Источник:
- © пресс-служба БФУ им. И. Канта
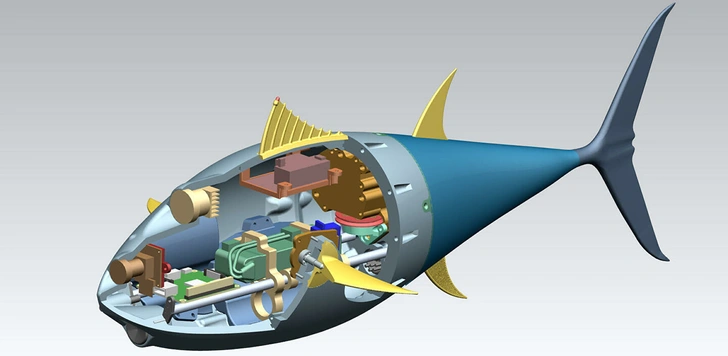
Для реализации задачи инженеры продумали каждую деталь робота, начиная от способа его передвижения в воде и заканчивая созданием искусственного интеллекта, который позволит ему принимать самостоятельные решения, ведь под водой нет системы GPS.
«Представьте, если в океане произошла экологическая катастрофа, например разлив нефти. В таком случае робот способен в качестве лидера или условного хищника увести косяк рыб в безопасное место. Недавно одна канадская компания стала активно использовать птицеподобных роботов в аэропорту, чтобы отпугивать настоящих пернатых от взлетной полосы. Востребованность таких устройств очевидна», — объяснил профессор Виктор Казанцев.
В ближайшее время ученые собираются усовершенствовать своего робота. Они подберут для него двигатель, аккумулятор, датчики зрения и устройство эхолокации и разработают систему искусственного интеллекта, чтобы «рыба» стала автономным аппаратом.
- Источник:
- © пресс-служба БФУ им. И. Канта
Вся «начинка» должна поместиться в корпусе, который полностью воспроизводит форму живого тунца для органичного единения с естественной средой обитания. Российские ученые также планируют создать и других искусственных рыб, например щуку и угря.
Использованы материалы РИА Новости