- Источник:
- VStock / Alamy
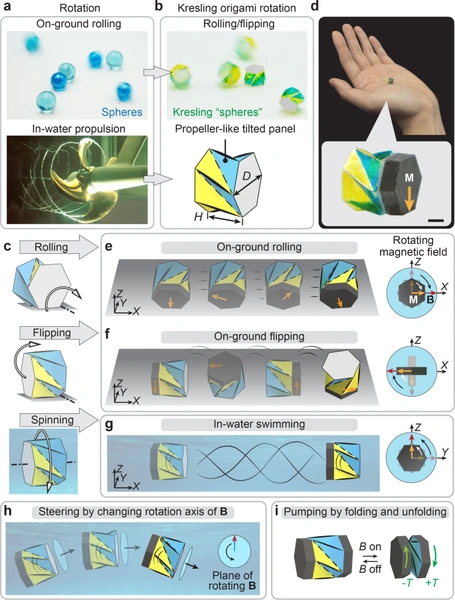
Миниатюрных беспроводных роботов инженеры из Стэнфордского университета. Устройства, которые в ширину не достигают даже 8 миллиметров, могут передвигаться по человеческому организму: кататься, переворачиваться, вращаться, ползать по любым поверхностям и плавать в любых его жидкостях.
Разработка, которая описана в статье в Nature Communications, построена на принципе оригами. Роботизированная амфибия перемещается при помощи магнитных полей, которые управляют не только самой конструкцией робота, но и направляют его движение. То есть, не нужны отдельные устройства, чтобы управлять им извне.
- Источник:
- Nature Communications
Робот перемещается до цели в «разобранном» состоянии. Достигнув больного органа, он определенным образом складывается и выдавливает из себя концентрированное лекарство. Как пишут разработчики, основными целями могут служить опухоли и тромбы, а также места скопления микробов. При этом будут сведены к минимуму побочные эффекты, которые возникают, когда пациент принимает таблетки или ему ставят уколы.
Сейчас основная задача — научиться отслеживать перемещения робота в организме. В ближайшее время конструкцию будут тестировать на животных, а затем перейдут к клиническим испытаниями.
Тем временем инженер-механик Рене Чжао уже планирует приступить к усовершенствованию робота, например, оснастить его камерами и щипцами и научить ползать по желудку и кишечнику. Тогда гастроскопия, эндоскопия, биопсия и другие исследования, некоторые из которых проводят без анестезии, станут абсолютно безболезненными.